
O projeto foi concluído depois de 7 meses de trabalho. O cliente pediu que o robô devia ser o mais possível parecido com uma barata, isto é:
1. Ter a aparência dum tipo de barata
2. Ter o tamanho de um tipo de barata
3. Se comportar naturalmente como as baratas
Aleksei Belousov, o construtor chefe, falou-nos sobre o projeto:
«Acho que o mais difícil foi encontrar o equilíbrio entre os três pontos. Por exemplo, a Universidade da Califórnia em Berkeley desenvolveu algo semelhante durante quatro anos mas lá não hvia objetivo de a fazer parecer natural e, por isso, o robô americano é mais rápido mas não sabe virar em movimento e não se parece nada como uma barata real».
No final, foi escolhida barata da América do Sul tipo Blaberus Giganteus. Mas não era possível fazê-la chegar a Kaliningrado e, por isso, os cientistas trabalharam com a espécie Blaberus Craniifer. A única diferença é o tamanho.
Segundo os engenheiros, durante os primeiros dois meses eles somente estudaram o inseto: como se comporta, como anda etc.
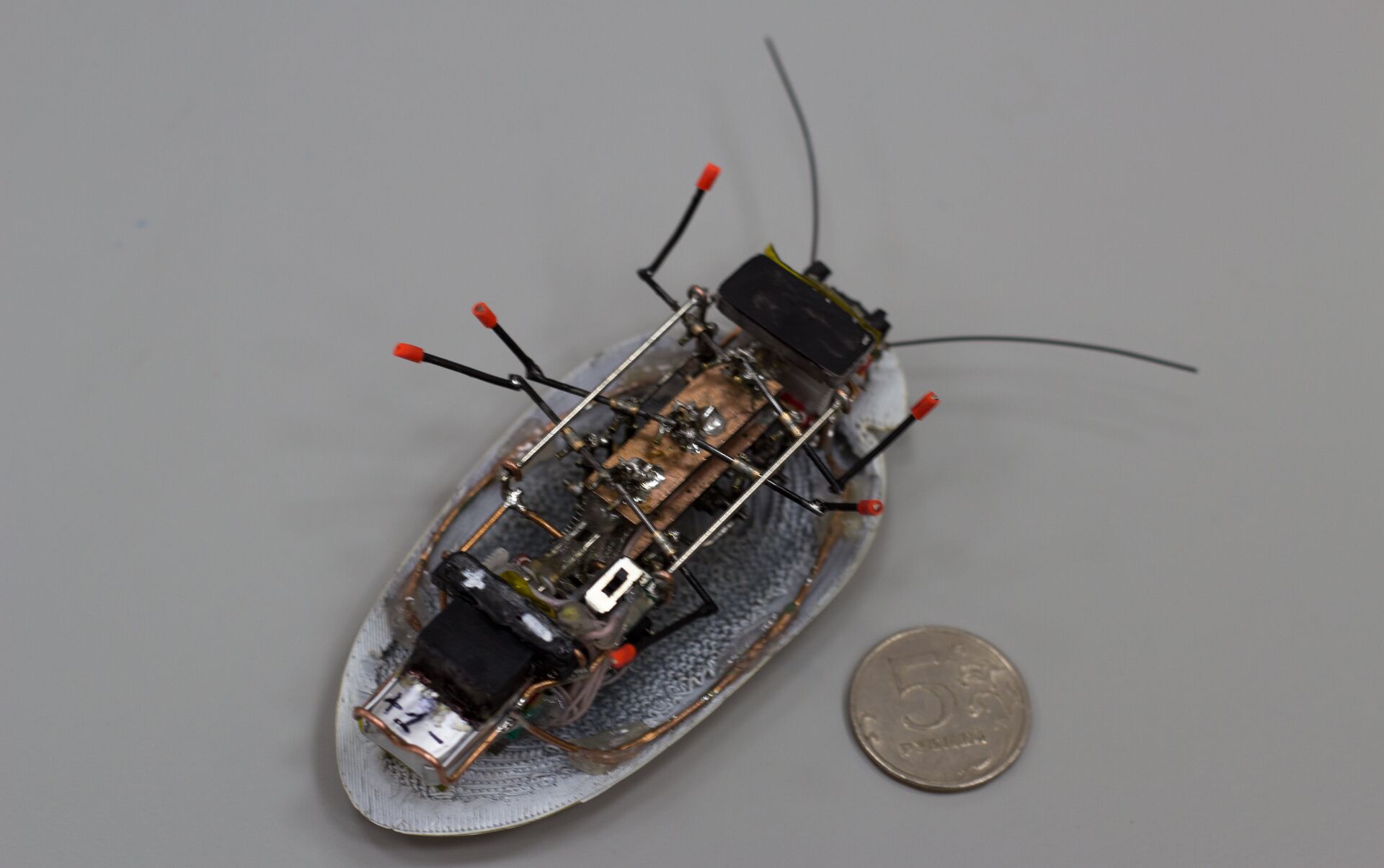
A barata- robô tem o comprimento de 10 centímetros, se move à velocidade de 30 centímetros por segundo. O robô está dotado de sensores de fotosensibilidade e sensores para contornar obstáculos.
O robô é dirigido através de uma aplicação para celular.

Danil Borchevkin, engenheiro principal da Universidade Federal Báltica, explicou o uso prático deste robô. Primeiramente, ela serve para os cientistas treinarem os métodos de produção de sistemas usados na medicina, por exemplo, na substituição de membros perdidos, em que são precisos mecanismos de dimensões muito pequenas.
O segundo objetivo é saber que barreiras tecnológicas existem: o que podemos fazer nós próprios, o que é preciso comprar.

É de assinalar que o robô pode transportar até 10 gramas de carga útil o que interessou os militares porque o mini-robô com uma câmera pode se infiltrar em lugares de difícil acesso.
O grupo de cientistas da universidade promete que, dentro de uma semana, eles irão apresentar uma amostra, com colorido de camuflagem.


{kind=link}
{kind=link}
{kind=link}
{kind=link}